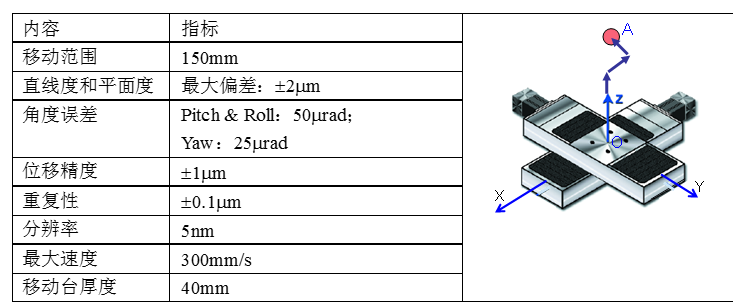
为了实现二维运动,将两个相同的一维移动台按照如图所示的方式放置。瞄准点A如图所示。X坐标不随移动台移动,Y坐标随下移动台的滑块移动,Z坐标随上移动台的滑块移动。物体初始位置坐标为:X=–20mm,
Y=–30mm,Z=50mm(离上面的移动台50mm)。位移用光栅尺测量(按照光栅尺在移动台上表面计算)。一维移动台的主要参数如下。单项阿贝误差按照阿贝臂最长的位置计算,且考虑阿贝臂的时候从所对应的移动台的台面算起。阿贝误差按照随机误差合成计算。当物体沿X轴正方向移动50mm,沿Y轴正方向移动70mm时,在X方向引入的阿贝误差是:
A 5.34μm
B 6.52μm
C 5.26μm
(2)单选题上题中,在Y方向引入的阿贝误差是:
A 6.40μm
B 3.61μm
C 3.69μm
(3)单选题上题中,在Z方向引入的阿贝误差是:
A 5.00μm
B 2.55μm
C 3.54μm
(4)单选题上题中,X方向测量的最大误差是:
A 10μm
B 12μm
C 9.5μm
(5)单选题上题中,在Y方向测量的最大误差是:
A 5.34μm
B 7.5μm
C 7μm
(6)单选题下图是制作全息光栅的曝光光路。分光镜将激光分成左右两束。两束激光分别经过对应的扩束准直系统后,成为大口径的平行光。两平行光在基板上产生干涉条纹用于全息曝光;同时平行光也入射到参考光栅上,其中右侧平行光的–1级衍射与左侧平行光的0级反射相干涉,产生的干涉信号被探测器探测后,用于驱动压电陶瓷以调整右下角反射镜的位置,实时锁定曝光干涉条纹的位相。这样的干涉系统符合:

A 光学自适应原则
B 阿贝原则
C 爱彭斯坦原则
D 都不符合
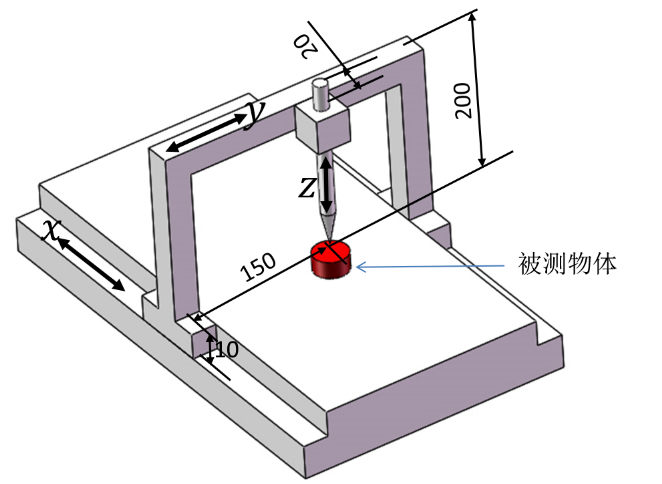
(7)单选题用三坐标测量机测量图中的圆柱体,不同方向的测量线位置,以及被测物体到各个测量线之间的距离如图所示,单位mm。绕x,y,z轴的转角误差分别为:θx=10μrad,θy=20μrad,θz=30μrad。请计算此时在X方向上产生的最大阿贝误差:
A 4.7μm
B 8.5μm
C 9.5μm
(8)单选题请计算上题在Y方向上产生的最大阿贝误差:
A 2.1μm
B 2.6μm
C 7.8μm
(9)单选题请计算上题在Z方向上产生的最大阿贝误差:
A 1.6μm
B 1.9μm
C 0μm
获取标准答案请阅读全文
未经允许不得转载!第3章-光电仪器设计原则-练习题【含答案】 光电仪器设计